
La miniaturisation croissante des systèmes laisse présager que les futurs systèmes de drones seront à la fois plus compacts, plus intelligents et plus envahissants. Ils pourront ainsi être opérés non individuellement mais par vagues ou par essaims.
Les futurs systèmes de drones
Pour la plupart de nos concitoyens et même pour certains décideurs, le mot drone évoque encore un aéronef de type avion, décollant d’une piste conventionnelle, catapulté, ou déployé verticalement, et opéré à distance dans le but d’effectuer des missions de surveillance, le plus souvent militaires. L’essor des mini-drones (de l’ordre du mètre), voire des microdrones (de l’ordre de la dizaine de centimètres) ou même des nanodrones (de l’ordre du centimètre), s’il n’est pas passé inaperçu du grand public, reste considéré comme un épiphénomène vis-à-vis des usages militaires. Sans doute faudra-t-il encore attendre quelques années pour que ces systèmes se répandent vraiment dans l’espace aérien général, mais en matière d’armement, il n’est jamais inutile d’anticiper. Ainsi, l’usage de drones artisanaux larguant des grenades par les factions islamistes au cours de la bataille de Mossoul (2016) a permis de constater que de nouvelles menaces se font jour du fait des nouvelles possibilités offertes par la miniaturisation des systèmes et l’amélioration fulgurante de leurs fonctionnalités.
Pour autant, l’expérience accumulée dans l’emploi des drones au cours des différents théâtres d’opérations extérieures (notamment en Afghanistan et au Mali) pourrait laisser penser que les armées qui détiennent cette technologie possèdent une arme sans risque pour nos forces, capables, selon l’expression du général américain David Deptula, de « projeter de la puissance sans projeter de la vulnérabilité » (1). De ce confort apparent résulte le glissement progressif de la doctrine d’emploi des drones dans les forces françaises au cours des dix dernières années : d’abord limités à des missions de renseignement et d’observation, puis engagés pour la désignation de cibles au profit des forces déployées sur le terrain, puis coordonnés avec des hélicoptères de combat et bientôt équipés de munitions avec la capacité de frapper en temps réel comme annoncé par la ministre des Armées Florence Parly en septembre 2017 (2). L’absence théorique de risque pris par les opérateurs, suscitant parfois de curieux « procès en lâcheté » semblables à ceux intentés autrefois aux artilleurs ou aux bombardiers, représente un avantage considérable sur les systèmes d’armes qui exposent davantage nos combattants. Cela sera sans doute encore vrai pendant un certain nombre d’années, mais il faut se rendre à l’évidence : les futurs systèmes de drones seront beaucoup plus envahissants et intelligents que nos systèmes actuels et aucun opérateur, aussi protégé que possible dans son « shelter » (abri), ne sera indéfiniment à l’abri des futurs systèmes de drones.
Des drones plus compacts et plus nombreux
Le rapide développement des systèmes embarqués d’une part, mais aussi la densification énergétique qui a accompagné la téléphonie mobile d’autre part, ont ouvert la voie à des aéronefs de plus en plus légers et compacts. Il y a maintenant davantage de puissance de calcul dans la plupart des smartphones que dans un drone Harfang. Cette puissance de calcul va continuer de croître ainsi que la qualité de la chaîne vidéo disponible sur les drones. Pour 1 000 euros environ, un particulier peut désormais avoir accès à une caméra volante gyro-stabilisée de très haute résolution (4K) et même à des caméras thermiques de type micro-bolomètres non refroidis qui commencent à fleurir sur les téléphones mobiles haut de gamme. La question de savoir si l’on doit continuer à investir dans un petit nombre d’appareils équipés de boules électro-optiques à longue portée extrêmement onéreuses, ou bien dans un très grand nombre de petits drones jetables pouvant s’approcher au plus près de la scène à observer, va commencer à se poser sérieusement dans les prochaines années.
Mais s’il est plus difficile pour les industriels de l’armement de réaliser de fortes marges sur des systèmes aériens qui s’apparentent à des jouets du commerce, les lois du marché imposeront d’elles-mêmes qu’il est préférable, pour réaliser une mission d’observation donnée, d’utiliser plusieurs petits vecteurs aériens plutôt qu’un seul. En outre, la miniaturisation des drones ne permet pas seulement de réaliser des économies ; elle donne la possibilité de réaliser des missions hors de portée des drones conventionnels. L’importance des combats urbains conjuguée à la quasi-impossibilité d’effectuer des frappes massives en ville – du moins en ce qui concerne les pays soucieux de respecter le Droit international humanitaire – rendent les drones armés de type Reaper moins pertinents dans un tel contexte. Des drones miniatures capables de détecter et éventuellement de neutraliser un sniper embusqué seront une aide précieuse pour sécuriser la progression du fantassin en ville. L’exemple actuel du Black Hornet initialement développé par Peter Muren de la société ProxDynamics, et aujourd’hui distribué par FLIR, illustre le développement d’un nanodrone de type hélicoptère de 20 grammes, équipé de caméras vidéos et infrarouge, et capable de voler 25 minutes. Il s’agit là d’un remarquable début. Pour le moment, ces nanodrones ne sont pas armés, mais l’Armée de l’air américaine ne cache pas son intention de doter ces systèmes d’une charge militaire capable d’exploser au visage d’un combattant ennemi. Leur petite taille permet en effet d’envisager d’investir un bâtiment à travers un soupirail ou une ouverture réduite, voire des conduites souterraines, de sorte que les personnels retranchés à l’intérieur d’un bâtiment deviendront très vulnérables. Le microdrone suicide Rotem commercialisé par la société israélienne IAI constitue un concept de ce genre et indique au passage que la frontière entre drone et missile devient aujourd’hui poreuse.
Pour le moment, la doctrine militaire d’emploi des micro- et nano-drones repose sur l’équipement d’un système par section d’hommes, voire un système par homme. Mais l’avenir est à l’essaim de drones, fonctionnant de manière coopérative, avec réallocation dynamique de tâches en cas de panne ou d’incident d’un vecteur aérien. Alors que la société Intel vient de réaliser le record de drones opérés par une seule station sol (1 200 drones coordonnés en décembre 2017 à l’occasion des Jeux olympiques d’hiver de PyeongChang), les ballets aériens de drones se généralisent (par exemple : Verity Studios). La capacité de communication directe entre drones par la technique Ultra Wave Band (UWB) laisse augurer des fonctionnalités nouvelles de type vol en formation serrée avec la perspective de conduite de vols coordonnés de drones à faible coût. Cette situation est comparable à celle d’un régiment composé de « pions tactiques » considérés autrefois comme des unités de valeur peu coûteuses individuellement, mais dont l’effet de groupe a pu être utilisés dans les conflits conventionnels jusqu’au début du XXe siècle sous forme de vagues d’assaut successives. Seuls des drones de petite taille permettent d’envisager de telles cohortes. Sur un plan éthique, on voit que le pas sera bientôt franchi depuis une décision de tir dans laquelle un opérateur unique commande à un seul drone armé, vers une décision de tir dans laquelle un opérateur unique commande à une formation de drones, diluant ainsi la responsabilité en cas de dommages collatéraux.
Des drones plus « intelligents »
Les nouvelles techniques de robotique inspirées des progrès de l’Intelligence artificielle (IA) permettent désormais d’envisager la résolution de situations complexes dans lesquelles la perception de la situation est entachée d’erreur. Si le jeu d’échec ou le jeu de go, dans lesquels la situation du camp adverse est totalement transparente, se prêtent bien aux techniques d’apprentissage par renforcement au point que des programmes sont désormais capables de battre les meilleurs joueurs professionnels, il en va différemment des « jeux » dans lesquels la situation réelle est partiellement connue, comme sur un véritable champ de bataille. Néanmoins, les experts savent que même des jeux de stratégie qui simulent une situation de conflit dans laquelle les paramètres sont partiellement connus, tels que Starcraft ou Warcraft, ne résisteront encore à la suprématie de l’IA que pour un temps. Ces jeux de stratégie ne tarderont pas à suivre le chemin des échecs, du go ou du shogi pour lesquels la machine fera mieux que le meilleur champion humain. Ainsi, la densification de la puissance de calcul embarquée sur drones et l’accroissement des performances algorithmiques conduiront à des prises de décisions autonomes plus pertinentes que celles prises à distance par un opérateur humain. Même si l’on clame au plus haut niveau que la décision d’ouvrir le feu restera dans la main d’un décideur humain, on peut se douter que cette doctrine ne résistera pas longtemps à un principe de réalité face à l’efficacité et à la rapidité d’une décision de tir autonome. Parmi les puissances militaires dans le monde, certaines assument déjà sereinement l’idée de concevoir des drones de combat en partie dotés d’algorithmes non déterministes comme le drone russe Okhotnik, dont la configuration évoque fortement le drone de combat nEUROn. Or, de tels drones pourront délivrer jusqu’à 2 tonnes d’armement, en particulier des bombes guidées laser de 250 kg.
Dans les débats sur l’autonomie des drones armés, les juristes objectent souvent que le robot ou le drone n’auront jamais que le statut d’un bien mobilier – ou d’une chose – et non celui d’une personne, ce qui fera de l’humain opérant le drone, le principal responsable – sinon le seul – des dommages causés. L’opérateur pourra bien entendu se retourner vers sa hiérarchie, qui pourra à son tour incriminer le fournisseur du système, lequel se retournera vers son concepteur, etc. Cette chaîne de responsabilité n’est pas nouvelle et l’augmentation de l’intelligence embarquée ne changera pas fondamentalement le problème, pense-t-on. Cependant, un robot ou un drone plus « intelligent », auquel on aura appris à mieux réagir à des situations imprévues et d’une très grande complexité sera un réceptacle commode pour diluer la responsabilité humaine du décideur. L’expérience de l’utilisation des chiens dans les armées est ici instructive. Un chien bien dressé constitue une arme redoutable sur le terrain, non seulement en raison de sa capacité à détecter un ennemi embusqué, mais également de le neutraliser en combat rapproché (3). Mais s’il peut être confronté à une situation de désorientation ou de stress inédite et devenir un danger pour son propre maître ou ses camarades, le fait reste exceptionnel et l’armée n’a aucun problème avec l’idée de disposer d’une arme « intelligente » dont les décisions propres comportent une certaine autonomie, en dépit du dressage. De fait, sa valeur militaire peut même être reconnue par une décoration. Dans un premier temps, les futurs systèmes de drones auront un peu le même statut que les chiens militaires dont le statut est inférieur à celui du soldat, mais supérieur à celui d’une simple arme mécanique.
L’accroissement de l’intelligence individuelle de chaque vecteur aérien s’accompagnera d’un autre phénomène, celui de l’apparition d’une « intelligence collective » lorsque les drones seront déployés en essaim. Le phénomène est bien connu des biologistes qui étudient les fourmis ou les bancs de poisson. Mus par des règles de coordination très simples, mais rigoureusement appliquées, comme le suivi moyen des individus proches et l’évitement du voisin immédiat, les bancs de poisson développent ainsi des stratégies de coordination efficaces contre les prédateurs, en l’absence d’un leader ou de chef de section organisant la marche serrée de chaque individu. De ces règles de coordination simples, ne requérant qu’une puissance de calcul limitée, naît une fonctionnalité nouvelle du groupe, lequel s’avère plus performant que la somme des contributions individuelles, d’où la notion d’intelligence collective. Ainsi, la capacité des fourmis à coopérer, que ce soit pour réaliser des passerelles permettant aux autres fourmis de franchir des obstacles insurmontables pour une fourmi isolée ou pour trouver collectivement le chemin le plus court dans un labyrinthe, est source d’inspiration chez les chercheurs. Ceux-ci parviennent maintenant à modéliser et à reproduire ces phénomènes dans une flotte d’agents coordonnés, qu’il s’agisse de robots terrestres ou de drones. À la manière des algorithmes de meutes déjà connus des tacticiens, les drones en essaim pourront ainsi s’attaquer à des cibles relativement puissantes et bien protégées en jouant sur l’effet de harcèlement et d’attaques coordonnées. Sur un plan militaire, cet effet de harcèlement constituera un avantage considérable par rapport à de gros systèmes qui mobilisent actuellement un nombre important d’hommes.
La perspective tend aujourd’hui à s’inverser dans les laboratoires de recherche : un seul opérateur pouvant bientôt opérer un grand nombre de drones en allouant au groupe une mission précise, mais sans spécifier le rôle de chacun, lequel sera déterminé par sa situation individuelle vis-à-vis de la cible ainsi que ses paramètres vitaux (batterie, intégrité des organes de bord, etc.). L’opérateur pourra ainsi piloter quelque chose comme le centre de gravité de l’essaim, laissant aux algorithmes embarqués le soin de coordonner les drones entre eux et de réattribuer dynamiquement à chaque drone de nouvelles tâches. On voit que ce phénomène d’intelligence collective n’est envisageable que parce que les « pions tactiques » sont nombreux et peu coûteux, voire jetables. Si les phénomènes de groupe, bien connus de la tactique militaire, seront gérés, sans doute encore pendant longtemps, par le haut commandement humain, il est assez clair que le pouvoir de l’homme dans la conduite des combats suivra une tendance générale à migrer du niveau tactique vers un niveau plus stratégique. Sur un plan éthique, il est important de réaliser que cette migration, ce recul du rôle de l’humain dans la conduite élémentaire des combats, se fera de manière irréversible. L’exemple des robots financiers qui ont remplacé les opérateurs humains pour passer des ordres de transaction boursière est édifiant : plus personne n’est aujourd’hui en mesure de revenir en arrière et de mettre en œuvre une règle telle que le contrôle en temps réel de chaque opération boursière par un agent humain. Il en sera de même pour la conduite de la guerre, en dépit des promesses solennelles qui sont faites aujourd’hui en ce sens vis-à-vis des « robots tueurs ».
Des drones plus endurants
Depuis que les drones sont déployés dans les opérations militaires, leur capacité à voler en permanence sur zone est un critère décisif d’utilisation. Il est en effet essentiel de maintenir un suivi permanent des opérations menées au sol pour éviter des effets de discontinuités pouvant mettre en péril des missions de renseignement. En outre, les missions ISR (Intelligence, Surveillance and Reconnaissance) réclament une capacité d’observation H24 pour repérer les subtiles variations de comportement de l’ennemi. Par conséquent, les futurs systèmes de drones sont appelés à être plus endurants. Certes, une noria de drones se relayant continûment peut, en principe, assurer cette permanence aérienne, mais la réalisation continue des opérations de déploiement-récupération n’est pas sans risque et représente un coût opérationnel non négligeable. C’est pourquoi chaque drone est amené à accroître considérablement son endurance. Plusieurs ruptures technologiques laissent augurer que les futurs drones deviendront capables de rester en l’air plus longtemps, malgré la tendance conjointe à en réduire la taille.
La première piste concerne la densification de la source d’énergie à bord. Si le vol thermique bénéficie de la forte densité énergétique des hydrocarbures, la miniaturisation des moteurs thermiques conduit à une chute significative de leur rendement. La raison n’est pas seulement liée à des difficultés de fabrication : la tolérance mécanique imposée par la réduction des fuites dans la chambre de combustion constitue une contrainte pratique qui s’ajoute à la fragilité intrinsèque de micro-structures articulées. Elle est surtout liée au fait qu’en première approche, les pertes de chaleur dans la chambre sont proportionnelles à sa surface, tandis que la puissance développée est proportionnelle à son volume. Or, le volume diminue plus vite que la surface de la chambre de combustion. Par conséquent, la transformation en travail mécanique de la chaleur dégagée par l’explosion dans les cylindres devient beaucoup moins efficace à échelle réduite.
Parallèlement, l’amélioration continue des moteurs à aimants permanents combinée avec leur souplesse d’utilisation et leur fiabilité, ont conduit la plupart des concepteurs de drones à considérer la propulsion électrique, y compris jusqu’à des aéronefs de l’ordre de 100 kg. Reste que la source de l’énergie électrique à bord reste un problème crucial. Les meilleures batteries actuelles basées sur la chimie au Lithium permettent d’atteindre des valeurs de l’ordre de 250 Wh/kg (contre environ 10 kWh/kg pour l’essence). Les projections des chercheurs pour de nouvelles batteries de type Lithium-air laissent augurer des densités énergétiques théoriquement comparables à celles de l’essence. En outre, les piles à hydrogène actuellement commercialisées permettent déjà d’accéder à des densités énergétiques comprises entre 600 et 1 000 Wh/kg, avec des progrès considérables accomplis dans la miniaturisation des modules de production d’électricité à bord.
Pour autant, ces nouvelles sources de stockage de l’énergie ne constituent pas la seule révolution attendue. L’énergie solaire, si elle reste tributaire des conditions d’ensoleillement au moment de la mission, représente une source d’accroissement de l’endurance qui donne lieu à des projets de « drones satellites » pouvant rester en l’air en permanence. Toutefois, l’exploitation de l’énergie solaire est d’autant plus intéressante que la taille du drone est réduite. En effet, la puissance électrique instantanée pouvant être extraite de l’énergie solaire est directement proportionnelle à la surface des cellules photovoltaïques déployées sur l’extrados du drone. Or, lorsque la taille du drone est réduite, la surface alaire diminue moins vite que sa masse. Par conséquent, le rapport entre la puissance recueillie par les cellules photovoltaïques et la puissance nécessaire au vol a tendance à augmenter lorsque le drone est plus petit. Mais même pour des drones de petite taille, l’énergie solaire ne peut représenter qu’une source d’énergie d’appoint.
Plus intéressante est l’énergie contenue dans l’environnement aérologique du drone. Les mini-drones de surveillance à voilure fixe évoluent typiquement à des niveaux de vol de 300 pieds où les perturbations atmosphériques sont importantes, en raison des effets de la couche limite atmosphérique et de la présence d’obstacles au sol générant des structures tourbillonnaires. Les faibles vitesses d’évolution des drones évoluant à ces niveaux de vol sont alors comparables aux vitesses de l’air incident dues au développement des perturbations atmosphérique. Les gradients de vent ainsi générés et l’énergie stockée dans les structures tourbillonnaires sont une source d’énergie tout à fait significative. Pour des avions conventionnels traversant ces structures à vitesse élevée, ces perturbations sont source d’inconfort et ne peuvent être exploitées sur un plan énergétique. En revanche, pour des drones de petite taille réalisant des missions de surveillance à faible vitesse, l’énergie aérologique constitue un gisement considérable d’énergie pour accroître leur endurance. Plusieurs espèces d’oiseaux exploitent ces sources d’énergie depuis des millions d’années et la transposition sur un drone de ces principes d’extraction d’énergie laisse entrevoir des capacités décuplées d’augmentation de l’élongation du drone ou de son endurance. Le cas de l’albatros exploitant ainsi le phénomène de « dynamic soaring » (ou vol de gradient) est particulièrement remarquable puisqu’un individu moyen peut effectuer près de 800 km en une seule journée, sans jamais battre des ailes, mais en exploitant seulement le gradient spatial constitué par la couche limite atmosphérique en effectuant des trajectoires « bouclées » selon des caps précis. D’autres volatiles tels que le faucon crécerelle exploitent dynamiquement les perturbations atmosphériques présentes à faible altitude pour surveiller un territoire des heures durant, en minimisant leur dépense énergétique. De telles stratégies de vol inspirent déjà des lois de pilotages permettant d’extraire l’énergie aérologique de manière autonome et de réduire la puissance nécessaire au vol en palier d’un facteur pouvant aller jusqu’à 40 % !
Finalement, les capacités nouvelles de communication entre drones et la possibilité de réaliser un vol en formation serrée ouvre la voie à une réduction de la puissance nécessaire au vol par interaction aérodynamique. Imitant le vol des oiseaux migrateurs qui se déplacent sur de longues distances pour franchir des distances inaccessibles à un individu isolé, un vol de drones en essaim peut ainsi potentiellement réduire cette puissance de vol d’un facteur 2, laissant la possibilité d’accroître considérablement l’endurance ou l’élongation de l’essaim pour atteindre la zone au-dessus de laquelle les drones pourront ensuite se déployer.
Des drones plus discrets et plus envahissants
L’utilisation de drones au contact se heurte à plusieurs problèmes pratiques, parmi lesquels la discrétion est l’un des plus importants. Les missions de renseignement à faible distance exigent que la présence du drone – et plus encore celle de l’opérateur du drone – ne soit pas détectée. Par discrétion, il faut bien entendu considérer la discrétion visuelle, électromagnétique et acoustique. Sur le plan visuel, l’expérience montre que des micro-drones de l’ordre de quelques dizaines de centimètres sont pratiquement indétectables à l’œil nu, notamment s’ils parviennent à se confondre avec des volatiles naturels. Le choix de l’US Air Force de financer les études sur les configurations de drones à voilures battantes dans les années 1990 a été sans doute largement guidé par l’idée d’un effet camouflage. Malheureusement, les difficultés technologiques inhérentes au vol battu ajoutées à la relative médiocrité propulsive du vol battu lui-même ont conduit la plupart des dronistes à se détourner de cette solution inspirée de l’imitation de la nature. Si la signature radar des drones de type multirotors est très faible, les opérateurs in fine réclament depuis plusieurs années des drones plus discrets sur le plan acoustique. À ce sujet, plusieurs groupes de recherche dont l’ISAE-SupAero travaillent aujourd’hui sur la réduction du bruit des drones, dont l’essentiel, s’agissant des drones électriques, provient de l’hélice. Le problème est contraint par le fait que l’objectif est de réduire la signature acoustique sans dégrader la performance propulsive. De nouvelles formes d’hélices silencieuses ont ainsi été conçues, réalisées puis testées en vol à l’ISAE-SupAero, avec le soutien de la Direction générale de l’armement (DGA), indiquant que des gains très significatifs peuvent être obtenus dans la réduction de la signature acoustique des drones. Mais ces développements n’en sont qu’à leur début car des pistes nouvelles de réductions de bruit s’ouvrent aujourd’hui avec l’exemple de la chouette dont la forme particulière des plumes permet d’obtenir un vol extrêmement silencieux propice à surprendre ses proies de nuit.
En termes de discrétion acoustique, la meilleure solution pour un drone consiste bien entendu à arrêter le fonctionnement des hélices. Cela suppose donc de travailler sur des moyens de s’accrocher aux obstacles ou simplement de pouvoir se poser au sol avant de redécoller lorsque le moment est plus propice. Plusieurs configurations de drones équipés d’une structure de protection ont été étudiées à l’ISAE-SupAero tels qu’un drone appelé Vision’Air équipé de ventouse pouvant se coller et se décoller sur une vitre d’immeuble (Fig. 1, gauche). En mode silencieux, un tel drone peut continuer à transmettre des images à distance sans attirer l’attention. Une autre configuration intéressante est le MAVion Roll&Fly qui est un drone convertible, capable d’effectuer des phases de vol stationnaire et des phases de vol horizontal et dont la structure de protection des hélices est en réalité une paire de roues libres permettant au drone de se poser, puis de redécoller facilement bénéficiant du fait que, par effet culbuto, l’engin reprend naturellement sa position verticale (Fig. 1, centre). En pratique, l’adjonction de roues permet également un déplacement aisé au contact des parois planes telles que les murs ou les plafonds, ce qui facilite considérablement la progression à l’intérieur des bâtiments, notamment lorsque l’on ne dispose pas d’une connaissance préalable des lieux. Récemment, l’École polytechnique fédérale de Lausanne (EPFL) a développé un concept de drone équipé d’une sphère ajourée pouvant pivoter sur deux axes et commercialisé par la société Flyability (Fig. 1, droite). Ce drone permet de s’approcher des obstacles, d’évoluer dans des environnements confinés et complexes sans rester bloqué et s’avère même capable de s’insinuer dans des conduites souterraines, des crevasses de glacier ou encore de traverser une forêt avec du sous-bois. On voit donc que ces différents concepts tracent la voie vers des systèmes de drones de plus en plus envahissants et robustes, combinant des fonctionnalités inspirées des robots terrestres et des robots aériens, voire des robots sous-marins comme l’illustre l’exemple du Loon Copter, un quadrirotor développé par l’Université d’Oakland qui peut voler au-dessus de l’eau, se déplacer sur la surface et finalement s’immerger et évoluer sous l’eau.

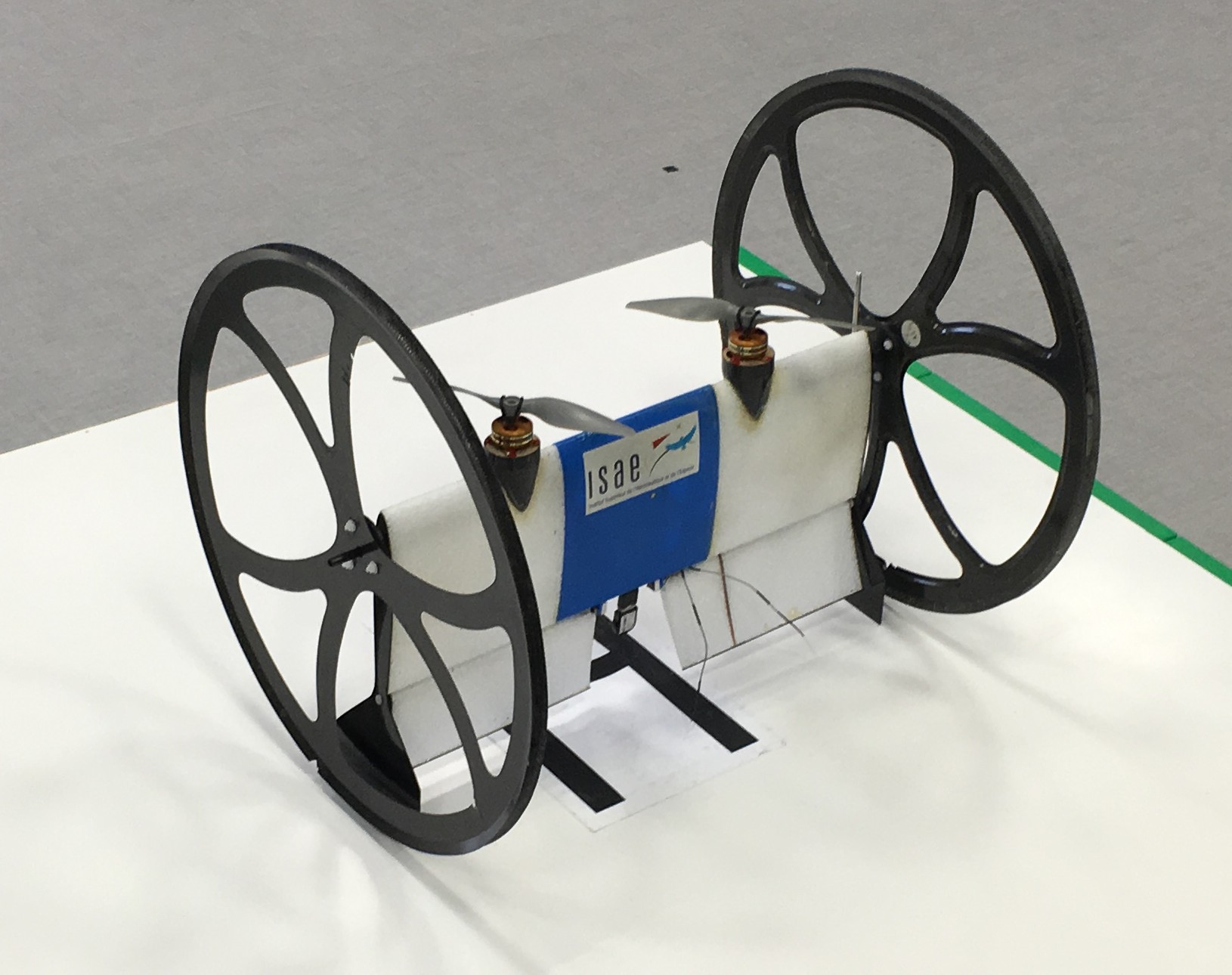

Fig. 1 – Les micro-drones : Vision’Air (ISAE-SupAero, à gauche), MAVion Roll&Fly ( ISAE-SupAero, au centre) et Elios (Flyability, à droite).
* * *
Les futurs systèmes de drones seront plus compacts, plus nombreux, bon marché – voire jetables pour certains, déployables en essaims, plus intelligents et adaptatifs, à la fois individuellement et collectivement, plus endurants et discrets et surtout plus envahissants grâce à leur capacité de s’insinuer dans des environnements complexes tels que des faux plafonds, conduites d’aération, égouts, etc. Ils n’offriront finalement que peu de répit et de zones de sécurité aux futurs combattants, mais constitueront en retour les compagnons indispensables à la progression des forces au sol. Sur un plan éthique, ces futurs systèmes ne seront plus contrôlés individuellement, mais collectivement, avec des capacités d’observation et d’action démultipliées qui rendront difficile une supervision humaine exhaustive et le contrôle préalable des règles d’engagement par un opérateur humain. ♦
(1) Lt-Gen. Deptula David, « Remotely Operated Air Power: Implications for Ethics, Policy and Strategy », Air Power Australia Essay on Military Ethics and Culture, ISSN 2201-9502, 2nd April 2013 (www.ausairpower.net/APA-EMEAC-2013-01.html).
(2) Parly Florence, « Discours de clôture de la ministre des Armées », Université d’été de la Défense 2017, Toulon, le 5 septembre 2017 (www.defense.gouv.fr/).
(3) En mai 2018, un chien militaire de race berger malinois a ainsi tué un sniper et sauvé la vie de 6 soldats des forces spéciales britanniques encerclés sous le feu djihadiste dans le Nord de la Syrie. cf. Williams Patrick, « SAS dog rips out jihadi’s throat and saves patrol caught in ambush », Daily Star, 9 juillet 2018 (www.dailystar.co.uk/).



.jpg)



