Les stratégies de déni d’accès et d’interdiction dans le domaine aérien, connues sous le nom A2/AD, se sont multipliées au début des années 2000 avec la prolifération du couple radar/missile antiaérien. Dans le milieu sous-marin, cette révolution n’a pas encore eu lieu en raison d’un environnement défavorable aux capteurs et effecteurs (performances, communications, intégrité). Le système d’écoute SOSUS a néanmoins permis à la marine américaine de suivre les sous-marins soviétiques pendant plus de 30 ans. Cet article s’interroge sur l’intérêt et la faisabilité de l’A2/AD dans le milieu sous-marin, en balayant les concepts et les travaux de recherche en cours ainsi que leurs implications pour la Marine nationale.
Stratégies de défense par interdiction en milieu sous-marin : du concept à la réalité
15 mai 2029, le Sous-marin nucléaire d’attaque (SNA) Suffren est en patrouille en mer de Norvège, en plongée à une profondeur de 250 mètres, 600 m d’eau sous la quille, aucun contact sonar reporté, il est seul et non repéré. Du moins le croit-il, car voici un peu plus de deux heures qu’il a été détecté par une Station autonome de fond (ASS), appartenant au système déployable d’écoute russe Harmony (1), déposée sur le fond quelques semaines plus tôt par le K-329 Belgorod, sous-marin nucléaire spécialisé dans les opérations sur les fonds marins. Puis c’est le bruit caractéristique d’une hélice de torpille que l’opérateur sonar perçoit, alors qu’il n’a entendu ni le bruit de l’entrée dans l’eau d’une torpille tirée d’un aéronef ni celui de l’ouverture du tube d’un sous-marin tireur. Non, la torpille est apparue soudainement, comme si elle avait été déjà là. Elle l’était, encapsulée dans son conteneur ancré au fond et attendant l’ordre d’engagement venu de la base militaire implantée en Nouvelle-Zemble, bordant la mer de Barents, où ont été reçus et analysés les signaux captés par Harmony.
Ce scénario prospectif digne d’une Red Team (2) n’est ni plus ni moins qu’imaginé à partir de projets existants ou de travaux de recherche en cours. Ces travaux visent à mettre fin au principal avantage opérationnel d’un sous-marin, son extrême difficulté de détection, et autoriser le développement de nouvelles stratégies de défense du milieu sous-marin par interdiction. Deux types d’interdiction sont communément admis quel que soit le milieu. Le déni d’accès qui traduit le fait de dissuader l’adversaire de pénétrer dans une zone d’opération et l’interdiction de zone qui s’entend quant à elle comme la limitation de la liberté d’action de l’adversaire au sein d’une zone d’opération. L’association de ces deux notions, sous le sigle d’Anti Access/Area Denial (A2/AD), est apparue dans la doctrine américaine au début de XXIe siècle afin de caractériser la fin de l’hégémonie de la projection de puissance et de force des États-Unis au regard de nouvelles capacités permises par les progrès technologiques et la prolifération du couple radar/missiles à longue portée, essentiellement dans le domaine aérien.
Dans le domaine sous-marin, l’A2/AD, hors zone côtière minée, a longtemps fait peu de sens en raison de la difficulté technique à l’instaurer et à l’absence de menace que constituaient les sous-marins sur les théâtres terrestres. Pour autant, la notion de maîtrise des mers, centrale dans la doctrine de l’US Navy durant la guerre froide, ne pouvait s’affranchir de celle du milieu sous-marin qui voyait proliférer la menace représentée par les missiles balistiques nucléaires tirés à partir des Sous-marins nucléaires lanceurs d’engins (SNLE). C’est la raison pour laquelle des systèmes d’écoute fixe Sound Surveillance System (SOSUS (3)) ont été mis en place dès les années 1950 afin de détecter et pister les sous-marins soviétiques dans l’Atlantique et le Pacifique Nord, posant ainsi les jalons d’une stratégie d’interdiction sous-marine à grande échelle.
Face aux nombreux travaux en cours de la part de nos alliés et de nos compétiteurs dans le domaine de la lutte des fonds marins (Seabed Warfare) et par extension leur impact sur le milieu sous-marin, la France s’est dotée d’une feuille de route dans le domaine de la maîtrise de fonds marins. « Pour protéger nos intérêts et garantir la liberté d’action de nos forces, pour en saisir les opportunités en appui de notre autonomie stratégique, nous nous dotons d’une stratégie de maîtrise des fonds marins (4). » Ce document établit un lien direct entre la maîtrise des fonds marins et la liberté d’action dans le milieu maritime, sur ou sous le dioptre. Par extension, il associe la non-maîtrise de ces fonds à une possible limitation de liberté d’action de nos sous-marins, y compris celle de nos SNLE dont la dilution garantit la possibilité d’une frappe nucléaire en second, essentielle à la crédibilité de notre dissuasion nucléaire.
Après l’étude des notions de déni d’accès et d’interdiction de zone éclairée par un regard historique dans le domaine maritime et sous-marin, nous verrons en quoi le déni d’accès pourrait avoir du sens dans le milieu sous-marin et comment les progrès technologiques ont de l’influence sur le concept pour finir par s’interroger sur l’intérêt de la France à investir dans ce domaine.
Le déni d’accès maritime, une notion vieille comme le monde
Historiquement, le premier exemple illustré d’une stratégie de déni d’accès utilisant le domaine maritime remonte à -480 dans le conflit opposant les Perses de l’empereur Xerxès aux cités-États de Grèce rassemblées au sein d’une alliance de circonstance menée par Sparte et Athènes. Face à des forces perses largement supérieures en nombre, Thémistocle, élu strategos (combinaison d’amiral et général), subit initialement plusieurs défaites en cherchant à exploiter la seule géographie terrestre pour contrer l’avantage du nombre. Néanmoins, après une victoire grecque lors de la célèbre bataille livrée dans l’étroit canal entre l’île de Salamine et le territoire athénien, compensant l’infériorité de la force par l’utilisation de la géographie côtière, les Grecs acquièrent la suprématie navale et parviennent à couper les lignes de communications maritimes (Sea Lines of Communication – SLOC) qui étaient l’unique moyen pour les Perses de se ravitailler. Contraignant Xerxès à retirer ses troupes affamées, il s’agit d’un exemple illustrant l’intérêt d’une stratégie inter-domaines de déni d’accès et introduit la notion de maîtrise des mers (Command of the Sea) sous sa forme la plus élémentaire, le blocus.
La maîtrise des mers envisage un contrôle total des océans tel qu’un adversaire potentiel ne serait pas en mesure d’affronter la flotte qui le détiendrait (5). Ainsi, selon Julian Corbett (6), la maîtrise des mers permet à la fois une liberté d’action le long des SLOC tout en empêchant l’adversaire d’utiliser ses mêmes lignes. Le blocus des forces navales (constituées des bâtiments à vocation militaire) adverses, prôné par Julian Corbett pour atteindre la maîtrise des mers, est une stratégie de déni d’accès par excellence.
Durant la guerre froide, pour faire face à la flotte sous-marine soviétique, l’US Navy, sous l’influence d’Alfred Thayer Mahan (7) qui considère la maîtrise des mers comme l’objectif stratégique majeur de la marine, étend cette maîtrise au domaine sous-marin. En effet, face à la menace que font peser les sous-marins à propulsion nucléaire soviétiques sur les groupes aéronavals américains, les États-Unis déploient le système d’écoute sous-marin SOSUS, en complément des avions de patrouille maritime, des sous-marins avec antenne passive remorquée et des navires remorqueurs de sonars (Surveillance Towed Array Sonar Ship, SURTASS (8)). Ces nouveaux sous-marins passent désormais l’essentiel de leur temps de patrouille en immersion mais sont moins silencieux que les sous-marins classiques, facilitant leur détection par sonar. Ce faisant et sous réserve de pouvoir faire suivre chaque sous-marin soviétique par un effecteur sous-marin, de surface ou aérien, l’US Navy met en place une stratégie qui peut s’apparenter à de l’interdiction de zone à grande échelle. En 1970, le maillage du système SOSUS permet à l’US Navy de couvrir la quasi-totalité du Pacifique Nord (9).
En réponse à cette stratégie, et conscient de ne pouvoir assurer une liberté de manœuvre en haute mer à ses sous-marins, la marine soviétique introduit dans les années 1970 la notion de bastion. Un espace, en portée de tir des cibles adverses, protégé par les forces de surfaces et les avions basés à terre dans lequel les SNLE ont la liberté d’action d’effectuer une frappe nucléaire en second, le cas échéant. Les Soviétiques sécurisent ainsi des espaces géographiquement limités que sont la mer de Barents et la mer d’Okhotsk (10). Ils profitent notamment du fait que ces espaces peuvent s’apparenter à des mers fermées, plus simples à sécuriser.
L’A2/AD dans le milieu sous-marin, de la théorie à la pratique
Les notions et capacités de déni d’accès et d’interdiction de zone ne sont pas nouvelles mais se sont réimposées, au cours des années 2000, au centre des débats stratégiques et conceptuels américains. Les capacités et concepts de contre-A2/AD sont notamment abordés au sein des Joint Operational Access Concept, Air-Sea Battle et Single Naval Battle (11). Les définitions modernes, selon le général Martin E. Dempsey (12), Chef d’état-major des armées des États-Unis de 2011 à 2015, sont :
– le déni d’accès fait référence aux « capacités, généralement de longue portée, conçue s pour empêcher une force ennemie de pénétrer dans une zone d’opération » ;
– l’interdiction de zone concerne les « capacités, habituellement de plus courte portée, consistant à restreindre la liberté de manœuvre d’une force ennemie dans la zone d’opération » (13).
Toutefois, pour l’US Navy, l’aspect prioritairement « aérien » et « capacités militaires » de l’approche du concept d’A2/AD est réducteur. Ainsi, en 2016, le Chief of Naval Operations, l’amiral John M. Richardson déclare : « Le problème avec le terme A2/AD est qu’il associe la stratégie et la tactique d’une manière qui néglige les aspects non militaires de la notion de déni d’accès, minimise le rôle de l’aspect dissuasif, et nous concentre comme un rayon laser sur les analyses tactiques et la façon sur les systèmes d’armes adverses se comporteront (14). » L’acception moderne se veut donc multidomaines et inclut nécessairement une forme déclaratoire préalable à but dissuasif.
Dans le principe et quel que soit le milieu dans lequel elle s’opère, une stratégie de déni d’accès ou d’interdiction de zone nécessite de disposer d’une capacité à détecter, à classifier (ami, neutre, suspect, hostile), à pister, à cibler et à détruire le cas échéant, capacité que l’on rassemble sous le sigle anglais F2T2E (Kill chain Find-Fix-Track-Target-Engage) (15). Le tout étant associé à un préalable déclaratoire dont le but est de dissuader l’adversaire de se risquer à pénétrer dans la zone défendue. Cette phase déclaratoire est à la fois primordiale et ambiguë dans le milieu sous-marin. Elle est primordiale car contrairement au milieu aérien, les capteurs utilisés par les systèmes d’écoutes fixes sont essentiellement passifs et donc indétectables par la cible. Le déclaratoire va ainsi permettre de contraindre ou dissuader l’adversaire avant même qu’il ne se déploie. En effet, il est important de noter que chaque sous-marin habité peut être considéré comme un capital ship, c’est-à-dire une unité précieuse que l’on ne se risque pas à perdre car elle constitue une capacité clé dans le dispositif, bien davantage que des avions et que cela contraint tout particulièrement les tactiques de contre-déni d’accès. Cependant, elle doit aussi être ambiguë car la connaissance de l’emplacement exact des capteurs permet théoriquement la mise en place de tactiques de contournement par exploitation de l’environnement.
Afin de crédibiliser la stratégie, la notion d’étanchéité de détection de la zone interdite est primordiale. Dans le milieu sous-marin, l’impact de l’environnement est particulièrement dimensionnant puisqu’il peut affecter les portées de détection directe d’un facteur un à quatre. Dès lors, l’étanchéité passe, soit par un maillage suffisamment resserré pour garantir la détection dans les conditions les plus défavorables, soit par un certain degré de mobilité (horizontale et verticale) des capteurs afin de pouvoir s’adapter aux conditions du moment et garantir la meilleure portée possible. Toutefois, il est important de noter que les portées des capteurs passifs (16) les plus modernes n’excèdent pas quelques dizaines de kilomètres pour la détection d’un sous-marin moyennement bruyant et quelques kilomètres voire quelques centaines de mètres pour un sous-marin silencieux. Dès lors, la surface des zones couvertes est directement dépendante du nombre de capteurs mais n’est en rien comparable à celles qu’on peut observer au-dessus de la surface. Ainsi, par limitation technique, le déni d’accès d’une zone significative passe par l’exploitation de la géographie sous-marine afin de concentrer les moyens sur des zones bien spécifiques, aux frontières de la zone interdite et souvent des points de passage resserrés.
Les capteurs à longue portée, s’ils ont existé au début de la guerre froide du fait de l’indiscrétion des cibles, n’existent plus. De plus, la géographie des fonds marins a une influence toute particulière. Elle favorise le défenseur, à l’inverse de ce qui se passe dans le milieu aérien où c’est l’attaquant qui peut tenter d’utiliser les masques de détection provoqués par le relief. Ainsi, en plaçant les capteurs de détection dans des passages obligés, on peut sécuriser l’accès à une zone plus vaste. L’exploitation du GIUK (Groenland, Island, United Kingdom, figure 1), espace maritime séparant le Groenland et l’Écosse, divisé en trois passages « resserrés » possibles pour un sous-marin en immersion, permet à l’Otan de « surveiller » l’entrée de la Flotte du Nord russe (17) dans l’Atlantique Nord.
Il reste néanmoins à mettre en place un dispositif capable de prendre le relais de la détection initiale et de pister l’adversaire afin de pouvoir assurer l’interdiction en engageant la cible au besoin. Ce suivi est coûteux en moyens sous-marins et/ou aéronavals. La tentation d’utiliser des moyens de substitution, autonomes ou semi-autonomes, est donc grande afin de préserver les unités habitées. Au quotidien, plus de 99 % des marins évoluant sous l’eau sont des militaires. Dès lors, le risque de dommage collatéral, consistant exclusivement en un tir blue on blue (unité amie) ou blue on white (unité neutre), est minimisé et pourrait inciter à aller plus loin dans l’utilisation de systèmes d’armes autonomes. D’autant que l’opacité du milieu complique l’attribution (18). À cette date, le sabotage du pipeline sous-marin North Stream 2, à moins de 30 km des côtes suédoises et par moins de 100 m de fond reste officiellement non attribué. Il en serait probablement de même si un sous-marin venait à être coulé au milieu de l’océan Atlantique.
Enfin, la principale force tactique et opérative des sous-marins reste leur furtivité, qui compense une vulnérabilité avérée contre des moyens aériens notamment. Dès lors, on pourrait penser que le simple fait d’être détecté et potentiellement identifié, sans pour autant être pisté, puisse constituer une contrainte suffisante permettant d’interdire une zone. Cela dépend en fait de la nature de la mission. L’analyse des conflits récents, et notamment l’exemple de la guerre des Malouines (1982), montre que la présence confirmée, ou même présumée, d’un sous-marin non localisé, fait peser une contrainte sur la liberté d’action de la flotte adverse d’avantage que toute autre menace. On ne peut donc pas s’affranchir de la capacité de pistage si l’on veut efficacement interdire une zone à un sous-marin.
Les moyens requis pour la mise en place d’une stratégie de déni d’accès sous-marin sont donc sans commune mesure avec ceux requis pour des stratégies semblables au-dessus de la surface au point que l’on peut s’interroger sur son efficience. Pour autant, une telle stratégie reste pertinente pour quiconque souhaite préserver la liberté d’action de ses propres forces maritimes de surface (civiles et militaires), voire de ses forces sous-marines.
Deux formes d’interdiction semblent envisageables et complémentaires par leur opposition :
– La maîtrise des mers étendue au milieu sous-marin, privilégiée par les États-Unis, destinée à couvrir une vaste zone géographique. Ce type de déni d’accès s’applique contre un adversaire déterminé à l’avance que l’on va contraindre au plus près de ses ports d’attache en exploitant les particularités de l’environnement sous-marin.
– Le bastion, privilégié par la Russie, et désormais par la Chine, qui ne peut s’appliquer que sur une zone géographiquement favorable (mer quasi fermée), limitée et contiguë à ses propres ports de façon à pouvoir s’intégrer dans une stratégie multidimensionnelle et bénéficier de l’apport des défenses basées à terre (fixes ou mobiles).
Ces bases théoriques étant posées, on ne peut faire l’économie de la prise en compte des aspects techniques qui, s’ils ont démocratisé les capacités A2/AD dans le milieu aérien, contraignent les stratèges sous-marins.
La technique, juge de paix des ambitions sous-marines
Les jalons techniques à atteindre sont les mêmes dans les milieux sous-marin et aérien. Ils sont associés à la kill chain F2T2E : détecter, classifier, pister, cibler et détruire. Le tout avec une chaîne de contrôle et de commandement efficace, et une permanence garantissant l’étanchéité de la zone dont on souhaite dénier l’accès.
D’ailleurs, dans le milieu sous-marin, ces étapes sont autant de défis techniques liés aux propriétés physiques du milieu aquatique. Il est presque étanche aux ondes électromagnétiques, impactant la détection et la communication. Les portées de détection acoustiques sont réduites et très sensibles à l’environnement (19), compliquant la mise en place d’un maillage de détection fixe. La permanence pose la question de la gestion de l’autonomie des systèmes impliqués. Dès lors, toute stratégie d’A2/AD est particulièrement coûteuse et consommatrice de moyens, notamment dès que ceux-ci sont habités, qu’ils soient aériens, de surface ou sous-marins.
En matière de détection initiale, les États-Unis ont clairement de l’avance sur l’ensemble des compétiteurs par un emploi combiné d’une multitude de types de capteurs. Le système de systèmes Integrated Undersea Surveillance System (IUSS) intègre diverses capacités de détection fixes, mobiles et déployables (20). Ses performances et capacités exactes sont évidemment classifiées mais il est intéressant de noter que par l’usage dual (21) qui est fait de ces capteurs, les États-Unis mettent en place une stratégie d’influence sur la zone surveillée qui couvrirait « l’Atlantique et le Pacifique Nord-Est (22) », soit peu ou prou les zones couvertes par SOSUS au début des années 1970.
L’US Navy a notamment investi dans le Tranformational Reliable Acoustic Path System (TRAPS) (23) développé par la Société militaire privée (SMP) américaine Leidos et a commencé à le déployer (24). Sur un sous-marin se déplaçant à 15 nœuds, la portée effective est estimée à 20 nautiques. Cela correspond, par exemple, au besoin de mettre en place plus de 430 capteurs pour couvrir la zone Est du Pacifique (jusqu’à 1 000 nautiques à l’ouest des côtes américaines) (25). On comprend l’intérêt pour les Américains de chercher à exploiter les zones au plus près des ports de l’adversaire afin de diminuer la surface de la zone à couvrir.
Les Russes ont également développé des systèmes d’écoute fixe : le MGK-608 en service depuis les années 1990 a récemment été remplacé par une version modernisée, fonctionnant en réseau, le MGK-608 SEVER (26). Ils ont aussi développé un système semi-fixe, Harmony, composé de stations autonomes de fond (27). Les systèmes fixes sont utilisés pour défendre les deux bastions que sont la mer de Barents et la mer d’Okhotsk (28) et les systèmes déployables sont théoriquement exploitables partout mais ont été testés en Arctique.
Enfin, les Chinois développent le projet de « Grande muraille sous-marine ». Composée d’une combinaison de capteurs fixes, de drones sous-marins (Uncrewed Underwater Vehicule, UUV), de stations de déploiement et de recharge, cette muraille à usage dual, civil (29) et militaire, pourrait opérer jusqu’à 2 000 m de profondeur (30) mais est avant tout destinée à protéger la mer de Chine méridionale, le bastion chinois.
En matière de pistage, de ciblage et d’engagement, il est pour le moment nécessaire d’utiliser des moyens habités, particulièrement précieux et coûteux. Pour autant, les projets visant à révolutionner l’art de la lutte anti-sous-marine (ASM) en utilisant davantage de systèmes autonomes ou semi-autonomes se multiplient. Il s’agit notamment d’utiliser des drones sous-marins, combinés avec des drones aériens, qui se chargeraient du pistage et du ciblage. L’engagement serait réalisé, toujours à partir de drones sous-marins mais avec des torpilles ou de charges sous-marines prépositionnées sur le fond et activables sur commande.
Les États-Unis, via l’Agence de recherche et de développement à usage militaire du département de la Défense (DARPA), explorent plusieurs concepts et projets en ce sens. En premier lieu, au travers d’une gamme complète de drones sous-marins ou de surface de taille moyenne (MUUV ou MSUV) – comme le Sea Hunter (surface) –, à très grosse (XLUUV (31)) – comme le Echo Voyager/Orca (32) – disposant d’une grande autonomie et pouvant remorquer une antenne sonar. En second lieu, via de nombreux systèmes reposant sur le fond, soit dans le but de soutenir les drones par des stations de recharge en énergie et de nœuds de communication (Forward Deployed Energy and Communications Outpost – FDECO), soit par des systèmes de charges utiles encapsulées disposés sur le fond, comme le Modular Undersea Effectors System (MUSE) (33).
Cette approche qui consisterait à remplacer les moyens habités par des moyens autonomes vise évidemment à réduire les coûts mais permettrait également d’améliorer la capacité à durer et donc la capacité d’instaurer une véritable capacité d’A2/AD dans le milieu sous-marin.
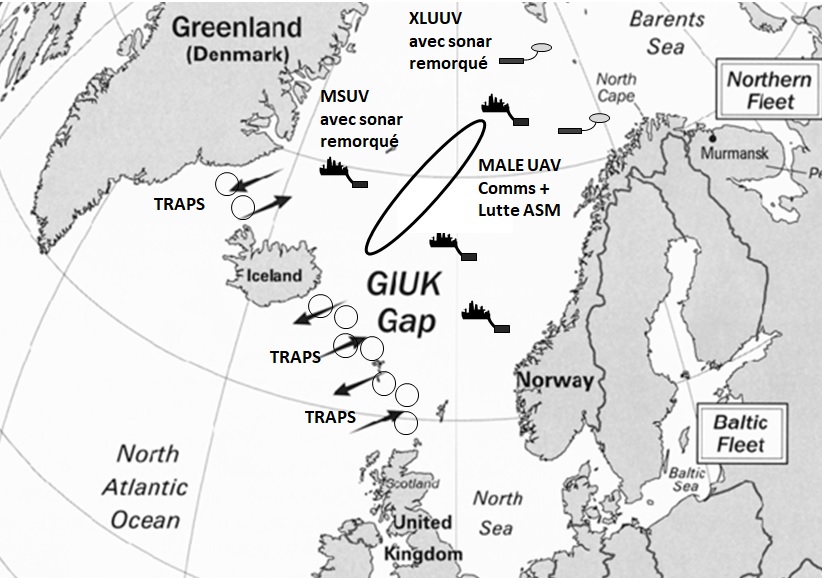
Figure 1 : Plan de recherche ASM d’un sous-marin russe par des moyens autonomes en mer de Norvège (34)
La figure 1 illustre l’articulation possible d’un dispositif de détection de pistage des sous-marins russes de la Flotte du Nord s’aventurant en mer de Norvège, par des systèmes autonomes et semi-autonomes. Ce dispositif combinerait la détection dans la profondeur par des moyens sous-marins (XLUUV) à l’ouvert de la mer de Barents, des moyens de pistage de surface (MSUV) en mer de Norvège et un système fixe de détection (TRAPS) dans les passages resserrés du GIUK. Le tout serait coordonné via un relai radio assuré par un ou plusieurs drones aériens (MALE) qui peuvent, au besoin, apporter un renfort de pistage sous-marin grâce au largage de sonars aérolargués.
L’utilisation et la maîtrise des fonds marins (Seabed) sont un enjeu préalable à ce type de lutte ASM puisqu’il va servir d’appui à nombre de systèmes impliqués. Quand on pense Seabed Warfare, on pense habituellement intervention sur les lignes de communication et d’approvisionnement en énergie. Néanmoins, il est important d’y inclure la lutte ASM via, historiquement, des capteurs et, prochainement, des effecteurs qui y seront exploités. Leur nombre est amené à augmenter et leur nature à se diversifier (docks de recharge, centre de transmissions, armes dormantes, etc.). C’est ce que l’US Navy a décidé de rassembler sous le concept de Full Spectrum Undersea Warfare (FSUW) dans le cadre de ses travaux techniques et doctrinaux (35).
La France et le déni d’accès sous-marin
La France ne possède, à ce jour, pas de système opérationnel d’écoute sous-marin souverain comparable au SOSUS ou à l’IUSS, tout à la fois pour des questions de moyens financiers et d’absence de moyens technologiques nationaux. Pour autant, cela ne signifie pas qu’un tel système serait dénué d’intérêt.
Les SNLE français étant basés à l’Île Longue, à l’extrémité de la pointe bretonne, ils s’élancent, dès le début de leur patrouille dans l’immensité de l’océan Atlantique, moyennant le franchissement du plateau continental armoricain dont la profondeur n’excède pas 200 m sur environ 200 km, limitant temporairement la mobilité verticale des sous-marins et donc leur discrétion. Cependant, comme ils sont capables de franchir cette zone sans être détectés par des navires ou des sous-marins étrangers, avec l’aide d’autres moyens, frégates et avions de patrouille maritime pour s’en assurer, on ne peut parler de « bastion français » dans lequel ils seraient cantonnés tout au long de leur patrouille. En effet, le concept d’emploi des SNLE français ne repose pas sur la notion de bastion mais sur celle de la dilution (36), autrement dit une patrouille libre dans l’immensité de l’espace subaquatique.
S’il n’y a pas de bastion à « défendre », il faut néanmoins s’assurer que l’espace sous-marin et en particulier les fonds marins sont exempts de tout capteur acoustique étranger. En effet, la présence d’un dispositif d’écoute, disposé sur le fond et exploité par un compétiteur, pourrait mettre en péril la discrétion de nos SNLE, par la captation de leur empreinte acoustique, élément essentiel pour une identification ultérieure, et affecter in fine la posture de dissuasion. Cela est vrai dans nos approches maritimes immédiates mais aussi, de façon plus globale, dans l’ensemble des espaces communs où un SNLE pourrait potentiellement patrouiller.
La mise en place d’un système de déni d’accès national disposé sur le plateau continental, à l’ouvert de la Bretagne, permettrait aux SNLE de le franchir, au départ ou au retour de patrouille, avec moins, voire aucune, aide extérieure des autres moyens de la Marine nationale. Ces derniers pourraient alors se concentrer sur d’autres missions. Ce n’est pour le moment officiellement pas l’option retenue par la France qui aborde la problématique A2/AD sous-marin par le contre-déni d’accès.
Le ministère des Armées s’est ainsi doté d’une Stratégie ministérielle de maîtrise des fonds marins qui doit permettre de répondre efficacement à l’extension de la conflictualité dans ce milieu, en particulier via les atteintes aux infrastructures stratégiques reposant sur le fond, et au-delà, dans l’ensemble du milieu sous-marin. Il s’agit de disposer de la capacité à intervenir sur le fond jusqu’à une profondeur de 6 000 m, permettant ainsi de couvrir 97 % des océans et de garantir à nos forces, en particulier de dissuasion, mais aussi les forces concourant à la mission « intervention » (37), leur liberté d’action et de ne pas se retrouver contraint par la mise en place d’une zone d’interdiction par un compétiteur.
Cette approche nécessite de suivre, comprendre, voire maîtriser les avancées technologiques dans le domaine afin de conserver une longueur d’avance stratégique. « Il importe donc de comprendre la réalité des stratégies de surveillance et d’interdiction sous-marine afin de contenir la menace à un niveau acceptable pour notre manœuvre militaire et d’ajuster notre effort au juste besoin (38). »
Parallèlement, la Marine nationale conçoit ses futures capacités de combat naval comme des systèmes de systèmes combinant moyens habités et autonomes (39). Toutefois, l’utilisation d’une telle combinaison dans les forces sous-marines n’est officiellement pas encore à l’ordre du jour. Pourtant, face à une ambition renouvelée en Indo-Pacifique (40), combinée à la volonté d’investir les fonds marins, il est indéniable qu’il existe une tension ambition-moyens qu’une dronisation partielle pourrait aider à résoudre en augmentant le nombre de plateformes. Il ne s’agit pas de remplacer nos SNA (41) mais de compléter la flotte par un certain nombre d’unités UUV auxquelles on pourrait confier des missions de surveillance dans la durée, notamment dans le Pacifique, privilégiant l’usage des SNA pour des missions à plus forte valeur ajoutée (42).
C’est dans cette optique que plusieurs industriels français s’intéressent de près aux systèmes de drones de surface ou sous-marins. Ils comptent profiter de l’initiative Perseus (43) de la Marine nationale pour pouvoir expérimenter leurs drones en conditions opérationnelles. Naval Group a, par exemple, présenté en 2021 le Drone sous-marin océanique (DSMO), UUV de grande taille pouvant mettre en œuvre d’autres drones en sous-ordres sous la supervision d’un opérateur en surface ou à terre (44). On peut aussi citer SEANICE, projet européen coordonné par Thales France qui vise à « étudier, tester, prototyper et élaborer la prochaine génération de solutions de lutte anti-sous-marine, basée sur la collaboration entre plateformes pilotées et non pilotées » (45).
Le projet de Loi de programmation militaire (LPM) 2024-2030 prévoit d’accroître les crédits consacrés à la recherche dans le domaine de la maîtrise des fonds marins en s’attachant, en particulier, à développer notre capacité à détecter et à intervenir par grands fonds.
* * *
L’A2/AD dans le milieu sous-marin est avant tout une notion en devenir. La révolution liée à la démocratisation des capteurs et effecteurs n’a pas encore eu lieu, tant s’en faut. Stratégie défensive, visant à préserver la liberté d’action de ses propres forces maritimes, l’A2/AD sous-marine s’est développée par briques tactiques et technologiques successives durant la guerre froide. Pourtant, malgré des progrès technologiques constants et une recherche abondante, les prérequis pour instaurer une zone d’interdiction efficace sont encore difficilement atteignables dans un milieu aux contraintes environnementales particulièrement prégnantes. En effet, outre une capacité de détection limitée, en comparaison des portées usuelles au-dessus de la surface, et rarement garantie, la capacité de suivi puis d’engagement de cibles potentielles nécessite encore l’usage de moyens mobiles habités. Dès lors, en raison de la rareté de ces moyens, l’utilisation de points remarquables et de passages obligés en exploitant des capteurs disposés sur le fond marin est une solution privilégiée pour celui qui souhaite couvrir des zones d’une taille digne d’intérêt.
L’avenir de l’A2/AD sous-marin passe donc à la fois par une dronisation des moyens de lutte ASM, en combinaison de moyens habités, permettant d’atteindre l’effet de masse minimal requis pour couvrir l’ensemble de la zone à défendre et à la fois par la maîtrise des fonds marins qui vont servir de support aux capteurs fixes, aux communications, aux armes et également aux drones sous-marins via des stations de docking par exemple.
Si les marines américaine, russe et chinoise investissent dans des capacités complètes d’A2/AD et de contre-A2/AD sous-marins, plusieurs marines ne sont pas en reste et investissent dans certaines briques de ces systèmes. C’est le cas de la Turquie, de l’Inde ou encore de la Grande-Bretagne. De son côté la Marine nationale, qui est à l’origine de la récente Stratégie ministérielle de maîtrise des fonds marins, a saisi l’intérêt d’investir dans les moyens de détection et d’intervention en profondeur afin de garantir la liberté de manœuvre et d’action de ses forces sous-marines, en particulier des SNLE. Pour autant, si la capacité à instaurer une zone d’A2/AD ne semble pas nécessaire en l’état actuel de la menace, il ne faut pas négliger l’intérêt de développer une telle capacité souveraine par un usage combiné et/ou complémentaire d’installations fixes, de drones et des moyens sous-marins habités. Une telle capacité serait utile à l’ouvert de la pointe bretonne afin de sécuriser les départs et retours en patrouille de nos SNLE, mais aussi pour exploiter certains passages stratégiques, comme le GIUK, afin d’augmenter notre propre perception de la menace sous-marine en Atlantique nord. À défaut, il serait particulièrement intéressant de pouvoir disposer des informations issues des capteurs américains, ce qui impliquerait en retour de pouvoir fournir une capacité significative dans le dispositif allié de lutte ASM et de Seabed Warfare. En ce sens, les investissements envisagés dans le projet de LPM 2024-2030 et les travaux exploratoires des industriels français en la matière sont les bienvenus.
17 mai 2023
(1) Ramm Alexey, « Russian “Harmony” for maritime surveillance », Russia Beyond, 30 novembre 2016 (https://www.rbth.com/).
(2) NDLR : le ministère des Armées a mis sur pied une Red Team (https://redteamdefense.org), composée d’une dizaine d’auteurs et scénaristes de sciences-fictions et chargée d’offrir une vision prospective visant à anticiper les risques futurs.
(3) Aussi connu sous le nom de projet Caesar, il s’agit d’un réseau d’hydrophones (40 par portion de 300 m) posés sur le fond, reliés à des stations à terre, NAVFAC, et exploitant les sons à basse fréquence émis par les sous-marins. Au milieu des années 1970, 20 NAVFAC couvrant les océans Atlantique et Pacifique Nord, étaient armés par environ 3 500 personnes. « The Cold War: History of the SOund SUrveillance System (SOSUS) », Université de Rhodes Island et l’Inner Space Center (https://dosits.org/).
(4) Parly Florence (ministre des Armées), « Lettre d’introduction », Stratégie ministérielle de maîtrise des fonds marins, février 2022 (https://www.defense.gouv.fr/).
(5) Henrotin Joseph, Les fondements de la stratégie navale du XXIe siècle, Économica, 2011, p. 208.
(6) Julian S. Corbett (1854-1922) est un stratège britannique qui a révolutionné la Royal Navy à la fin du XIXe siècle. Il prônait notamment la maîtrise des lignes maritimes de communication et le blocus naval.
(7) L’amiral Alfred T. Mahan (1840-1914) a influencé la doctrine maritime américaine avec son ouvrage The Influence of Sea Power upon History, 1660-1783, Claude Tchou, Bibliothèque des introuvables, 2001. Il prône la bataille décisive permettant d’anéantir la flotte adverse afin d’acquérir la maîtrise des mers.
(8) Il s’agit d’un bâtiment dédié à la détection et au pistage des sous-marins. Il remorque un sonar à immersion variable pour s’adapter aux conditions de propagation sonores.
(9) Clark Bryan, Cropsey Seth et Walton Thimothy A., Sustaining the Undersea Advantage: Disrupting Anti-Submarine Warfare Using Autonomous Systems, Hudson Intsitute, septembre 2020, figure 8, p. 38 (https://s3.amazonaws.com/).
(10) Breemer Jan S., « The Soviet’s Navy SSBN Bastions: Why Explanation Matters », RUSI Journal, n° 44, décembre 1989.
(11) Gros Philippe, « La question du déni d’accès et le concept Air-Sea Battle », RDN, n° 760, mai 2013, p. 50-56 (https://www.defnat.com/)
(12) Department of Defense, Joint Operational Access Concept (JOAC), Version 1.0, 17 janvier 2012, p. 40 (https://dod.defense.gov/).
(13) Ibid.
(14) Lagrone Sam, « CNO Richardson: Navy Shelving A2/AD Acronym », USNI News, 3 octobre 2016 (https://news.usni.org/)
(15) Cette boucle décrit toutes les étapes nécessaires entre la détection et la destruction ou la neutralisation de la capacité à combattre. On peut y associer la capacité de vérifier l’efficacité de la frappe défensive (Assess, le sigle devenant F2T2TEA).
(16) Les capteurs passifs décèlent le bruit et un traitement acoustique est nécessaire pour distinguer le bruit émis par la cible du bruit de la mer, dit « ambiant ». La portée de détection dépend donc à la fois des portées de propagation des ondes sonores et de la qualité du traitement acoustique.
(17) La Flotte du Nord est la plus puissante des quatre flottes composant la marine russe. Elle est composée, entre autres, de sous-marins des classes Typhoon, Delta IV, Oscar II et K.
(18) L’attribution est la décision politique d’incrimination d’une action donnée. Véritable instrument d’influence, elle peut être publique ou confidentielle en fonction du but recherché.
(19) Les ondes sonores ne se propagent pas en ligne droite dans l’océan mais selon une courbe qui dépend de la température, de la pression et de la salinité de l’eau. De plus, la capacité à détecter un sous-marin dépend du bruit ambiant qui lui aussi est variable. En conséquence, il est très difficile de faire des prédictions de portée de détection qui soient valables dans toutes les situations, sauf à être très pessimiste.
(20) Pike John, « Integrated Undersea Surveillance System (IUSS) », Federation of American Scientists, 21 juin 1997 (https://irp.fas.org/).
(21) L’usage civil s’étend de l’étude des phénomènes géophysiques sous-marins à celle des migrations des cétacés. Conlon L. Dennis, « Dual uses of the Navy undersea surveillance system », The Journal of the Acoustical Society of America, vol. 95, n° 5 (supplément), mai 1994 (http://pubs.aip.org/).
(22) Strategic Environmental Research and Development Program (SERDP) et Environmental Security Technology Certification Program (ESTCP), « Whale Monitoring Using the United States Navy Integrated Undersea Surveillance System (IUSS) » (https://serdp-estcp.org/).
(23) TRAPS est une version modernisée du système SOSUS. Il est doté de capteurs plus sensibles, de capacités de traitement numérique associées à de l’Intelligence artificielle (IA).
(24) Committee on Armed Services United States Senate, National Defense Authorization Act for Fiscal Year 2020 Report, 11 juin 2019, p. 85 (https://www.congress.gov/116/plaws/publ92/PLAW-116publ92.pdf).
(25) Clark Bryan, Cropsey Seth et Walton Thimothy A., op. cit., p. 53.
(26) Sutton H.I., « Analysis – Russia seeks submarine advantage in Artic », 20 septembre 2016 (http://www.hisutton.com/).
(27) Ramm Alexey, op. cit.
(28) Breemer Jan S., « The Soviet Navy’s SSBN Bastions: Why Explanations Matter », RUSI Journal, vol. 134, n° 44, p. 33-34.
(29) L’usage civil concernerait le système d’alerte avancé pour les catastrophes naturelles telles que les ouragans, tremblements de terre et tsunamis. Goldstein Lyle J., « China Is Building a “Undersea Great Wall” To Take on America in a War », The National Interest, 27 octobre 2017 (https://nationalinterest.org/).
(30) Tsering Dolma, « China’s undersea great wall project: implications », [Indian] National Maritime Foundation (NMF), 9 décembre 2016 (https://maritimeindia.org/)
(31) MUUV : Medium Uncrewed Underwater Vehicule. MUSV : Medium Uncrewed Surface Vehicule. XLUUV : Extra-Large Uncrewed Underwater Vehicule.
(32) Il s’agit d’un drone sous-marin de la classe 25 m/50 tonnes capable de déposer des charges sur le fond et d’emporter des drones de plus petite taille.
(33) Ministère des Armées, Stratégie ministérielle de maîtrise de fonds marins, op. cit., p. 20.
(34) Clark Bryan, Cropsey Seth et Walton Thimothy S., op. cit., p. 49.
Fond de carte : Salamander (commander), « Once more unto the gap », US Naval Institute blog, 20 avril 2016 (https://blog.usni.org/).
(35) Full Spectrum Undersea Warfare (FSUW) Innovative Naval Prototype (INP), Office of Naval Research (www.nre.navy.mil/).
(36) La dilution consiste à ce qu’un SNLE « disparaisse » aux yeux de tous durant sa patrouille, en se servant de l’immensité de l’espace subaquatique et de sa discrétion acoustique. Non détecté, il est ainsi en mesure, à tout instant, de procéder à une frappe nucléaire lorsqu’il en reçoit l’ordre.
(37) Ce sont les SNA qui assurent les missions d’intervention. Ce sont des missions de lutte sous, ou sur, la surface, des missions de projection de puissance vers la terre à l’aide de missiles de croisière, des missions de recueil de renseignement ou encore des missions de forces spéciales.
(38) Stratégie ministérielle de maîtrise de fonds marins, op. cit., p. 26.
(39) Dans le domaine aérien, la Marine nationale développe actuellement deux familles de drones, mini-drones à voilure fixe catapultés et drone hélicoptère de taille moyenne. Dans le domaine de la guerre des mines, le Système de lutte anti-mine futur (Slamf) combinera USV et UUV.
(40) Ministère de l’Europe et des Affaires étrangères (MEAE), La Stratégie de la France dans l’Indopacifique, février 2022, 77 pages (https://www.diplomatie.gouv.fr/).
(41) NDLR : La France dispose actuellement de 4 SNA classe Rubis (Casabianca, Émeraude, Améthyste et Perle) et de la tête de série de la classe Suffren (6 prévus pour succéder aux Rubis).
(42) Péria-Peigné Léo, « La dronisation navale, une opportunité pour la Marine nationale de 2030 ? », Briefings de l’Ifri, 25 août 2022 (https://www.ifri.org/).
(43) Perseus est une démarche conjointe de la Marine nationale et de la Direction générale de l’armement (DGA) pour stimuler et accélérer l’innovation technique. Elle offre la possibilité de tester en conditions réelles certaines innovations lors d’exercices ou de déploiements.
(44) Naval Group, « Présentation à la mission d’information flash fonds marins de l’Assemblée nationale », 15 novembre 2022.
(45) Lagneau Laurent, « Le Français Thales prend la tête d’un projet européen visant à “révolutionner” les capacités de lutte anti-sous-marine », Zone militaire - Opex 360, 13 septembre 2021 (https://www.opex360.com/).
SEANICE : antiSubmarine warfare European Autonomous Networked Innovative and Collaborative Environment.